DJI FlightHub 2 徹底解説
第11講 自動ワークフローについて
自動ワークフローについて
FlightHub 2に、定型的なドローン運用を効率化するための「Automated Workflow」が追加されました。
本機能を活用することで、フライト計画の実行から撮影データの分析、レポート生成までを一連のワークフローとして構成し、条件に応じて自動的に処理を進めることが可能です。
本項では、FlightHub 2における自動化ワークフローの基本構成や設定手順について解説します。
※本記事の内容は作成時点の情報に基づいています。最新の仕様や情報は変更される可能性があります。
■自動化されたワークフロー
自動化を使用するには、プロジェクト メンバーがプロジェクト ロールで自動化されたワークフローの権限を持っている必要があります。
あるいは、必要なすべての権限が含まれるプロジェクト管理者ロールをプロジェクト メンバーに割り当てることもできます。
自動ワークフローを有効にする前に、フライトプラン、アナライザー、レポートテンプレートの構成が完了していることを確認してください。

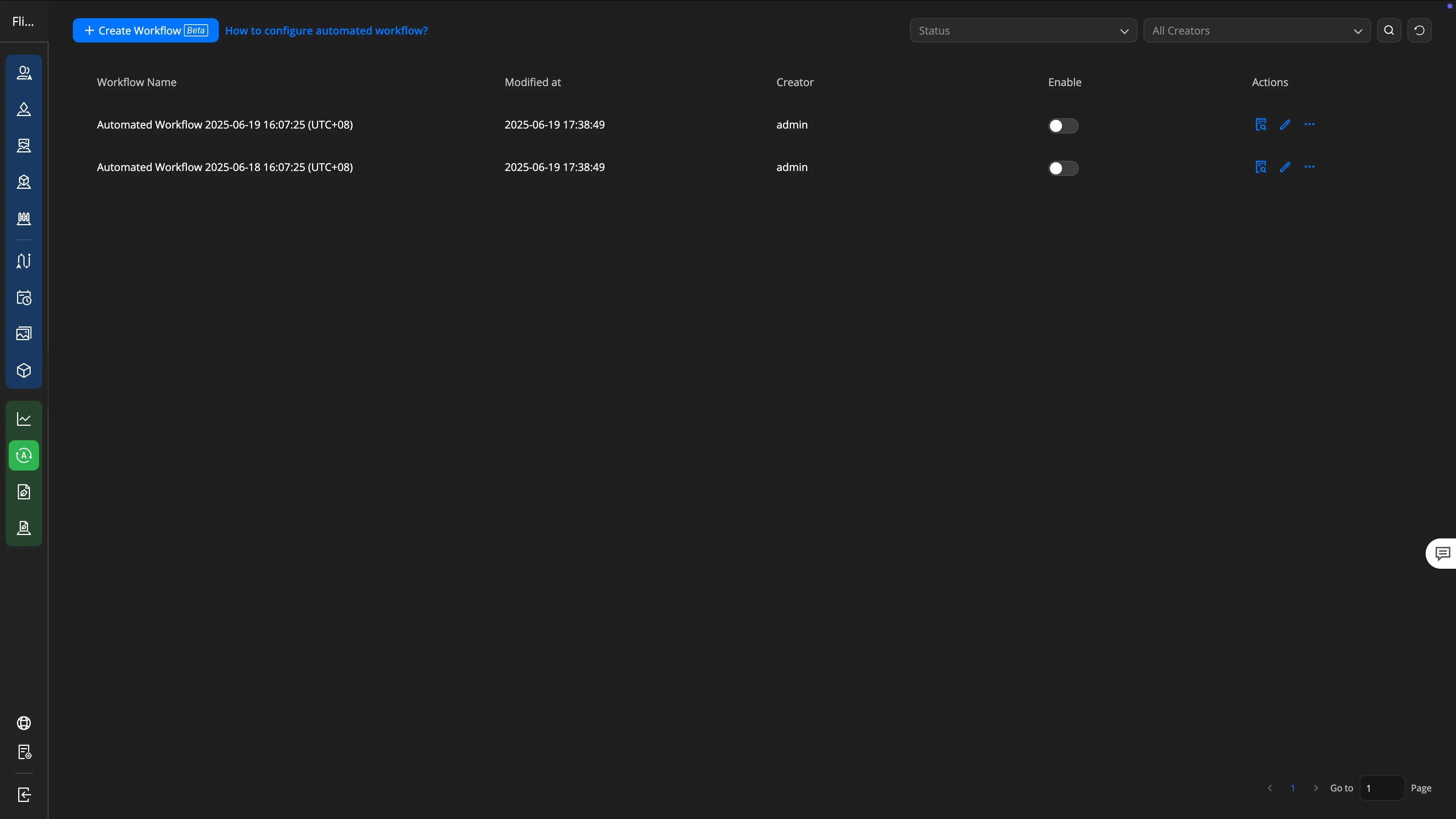
■ ワークフローの作成
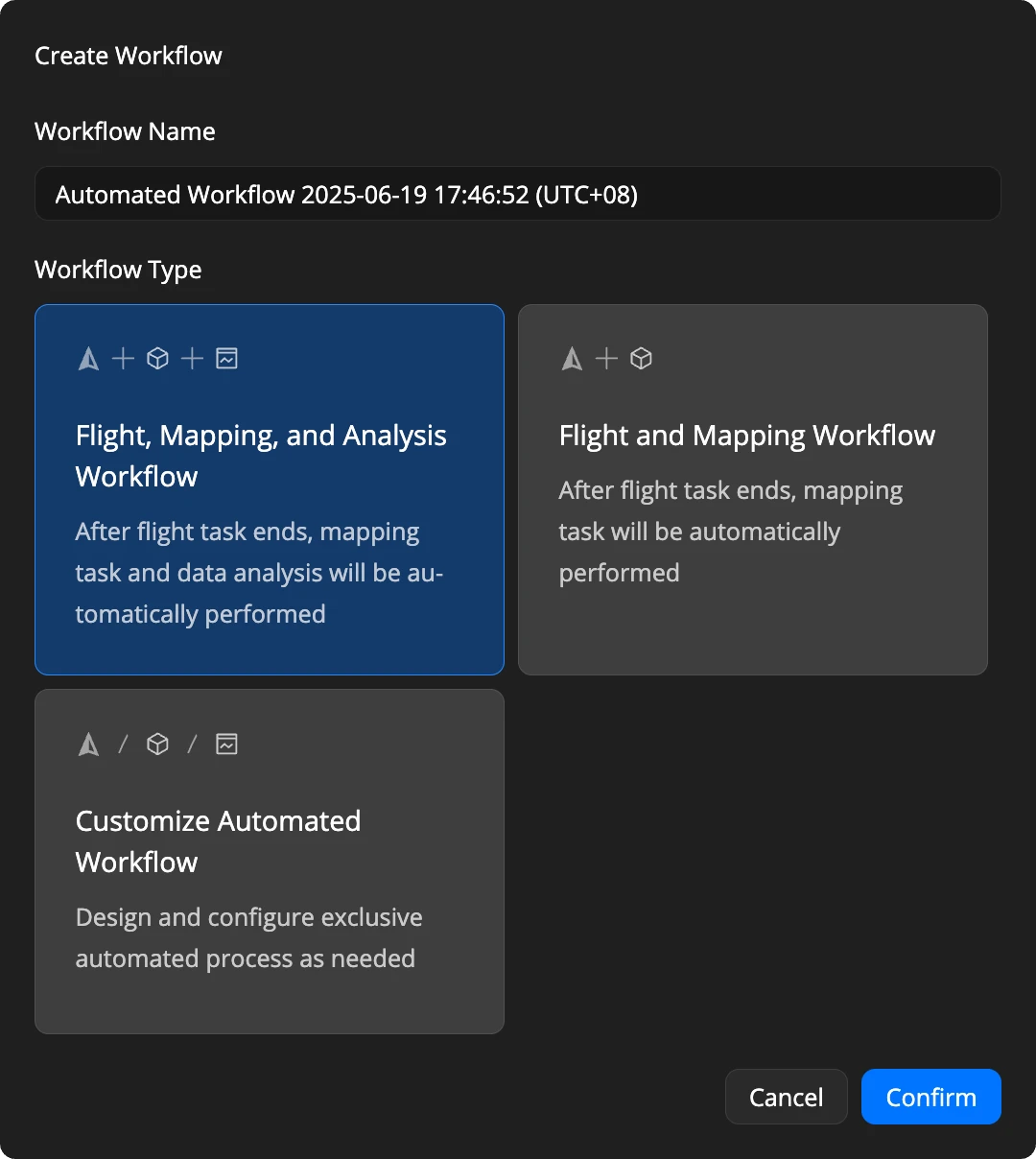
「Create Workflow」をクリックしてワークフロー テンプレートページを開き、必要な情報を入力します。
ワークフロータイプは下記の3種類から選択できます。
1. 飛行・マッピング・分析のワークフロー
飛行タスク終了後、マッピングタスクおよびデータ分析が自動的に実行されます。
2.飛行およびマッピングのワークフロー
飛行タスク終了後、マッピングタスクが自動的に実行されます。
3.自動ワークフローのカスタマイズ
必要に応じて、独自の自動処理プロセスを設計・設定できます。
■ ワークフローの編集
既に作成したものを編集する際は![]() を押して編集画面に移動します。
を押して編集画面に移動します。

![]() 1.定期ワークフローの編集
1.定期ワークフローの編集
現場運用の自動化と効率化を最大限に高める統合管理機能です。
飛行、マッピング、測定、計算、分析といった一連の作業をフルプロセスで統合し、データ取得からインテリジェントな解析までをエンドツーエンドで自動化します。
また、タスク管理も柔軟で、既存のタスクをそのまま利用したり、現場の要件に合わせて新規タスクを作成することも可能です。シナリオに応じてタスクの編集・連結も自由に行えるため、運用環境や目的に合わせた最適なワークフローを構築できます。
定期ワークフロー編集の詳細はコチラ
定期ワークフローの編集方法
「飛行、マッピング、分析のワークフロー」を例に挙げます。
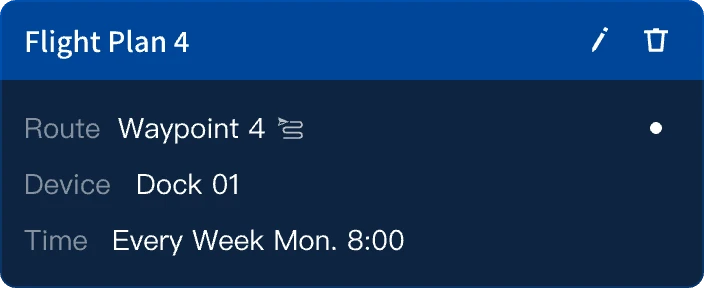
1.フライトプランの選択または作成
既存のフライトプランを選択
1.「+」またはフライトプランモジュールをクリックして、計画タスクの選択パネルを開きます。
![]()
2. 1 つまたは複数のフライトプランを選択します。
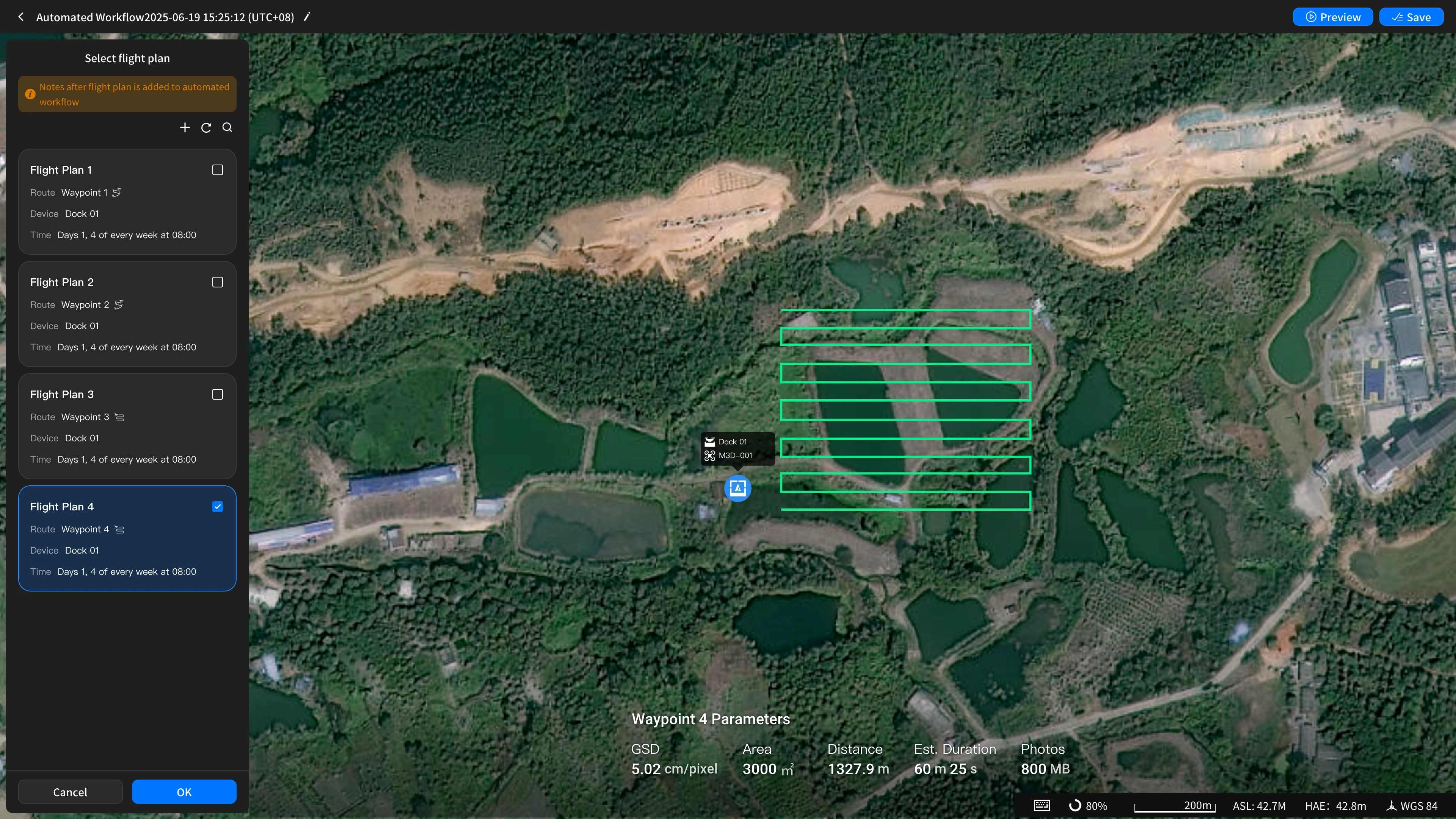
自動化されたワークフローでは、定期的なタスク(Recurring)のみがサポートされます。
フライトプランを自動ワークフローにリンクすると、自動フライトプランにアップグレードされます。タスクの実行日はワークフローのステータスに基づいて自動的に調整され、必要に応じてプランが再スケジュールされます。
自動ワークフローにリンクされたフライトプランでは、メディアファイルの直接転送は自動的に無効になります。
新しいフライトプランを作成する
1.「+」またはフライトプランモジュールをクリックして、計画タスクの選択パネルを開きます。
2.定期的なタスクを作成するには、「Create Plan」をクリックします。
フライトプランを編集する
![]() をクリックしてフライトプランを編集します。
をクリックしてフライトプランを編集します。
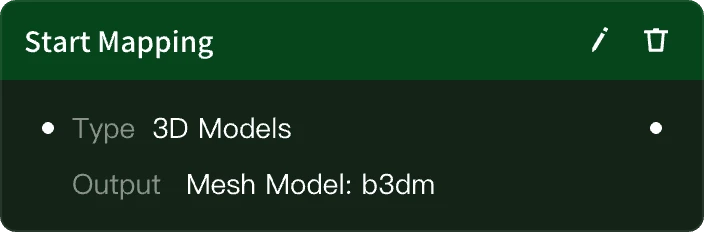
2.新しいマッピングタスクの作成
新しいマッピングタスクを作成する
「+」またはマッピングタスクモジュールをクリックして、マッピングタスク パネルを開きます。
![]()
マッピングタスクの編集
マッピングタスクを編集するには、![]() をクリックします。
をクリックします。
マッピング写真を選択
マッピング タスクページで、このタスクの関連するフライトプランで撮影された写真データを選択します。
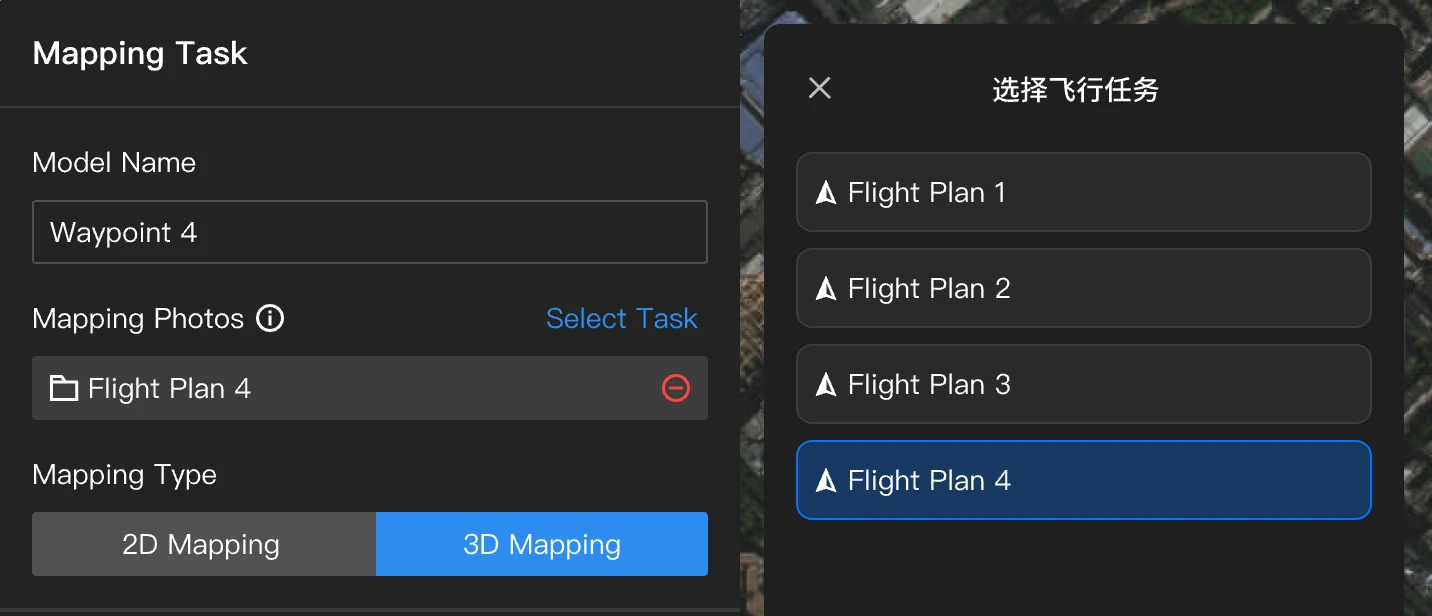
あるいは、自動化設定ページでフライトプランを対応するマッピングタスクにリンクすることもできます。そうすることで、フライトプランによって生成された写真データが自動的にマッピングタスクにインポートされます。
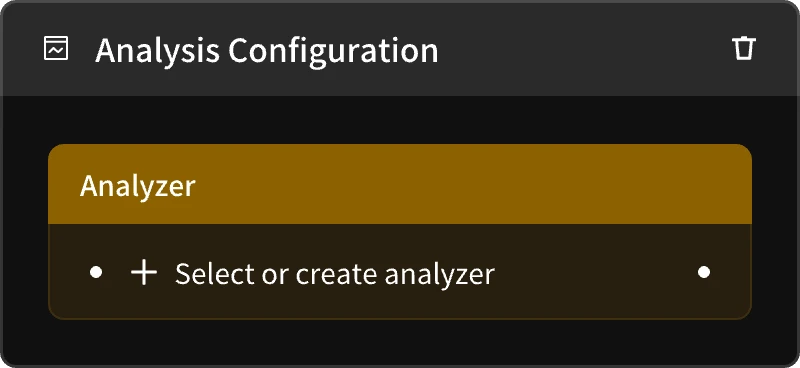
3.分析タスクを選択
アナライザーを選択
1.「+」または分析タスクモジュールをクリックして、アナライザーの選択パネルを開きます。
2.アナライザーを選択したら、「Confirm」をクリックします。「Create」をクリックして新しいアナライザーを追加することもできます。
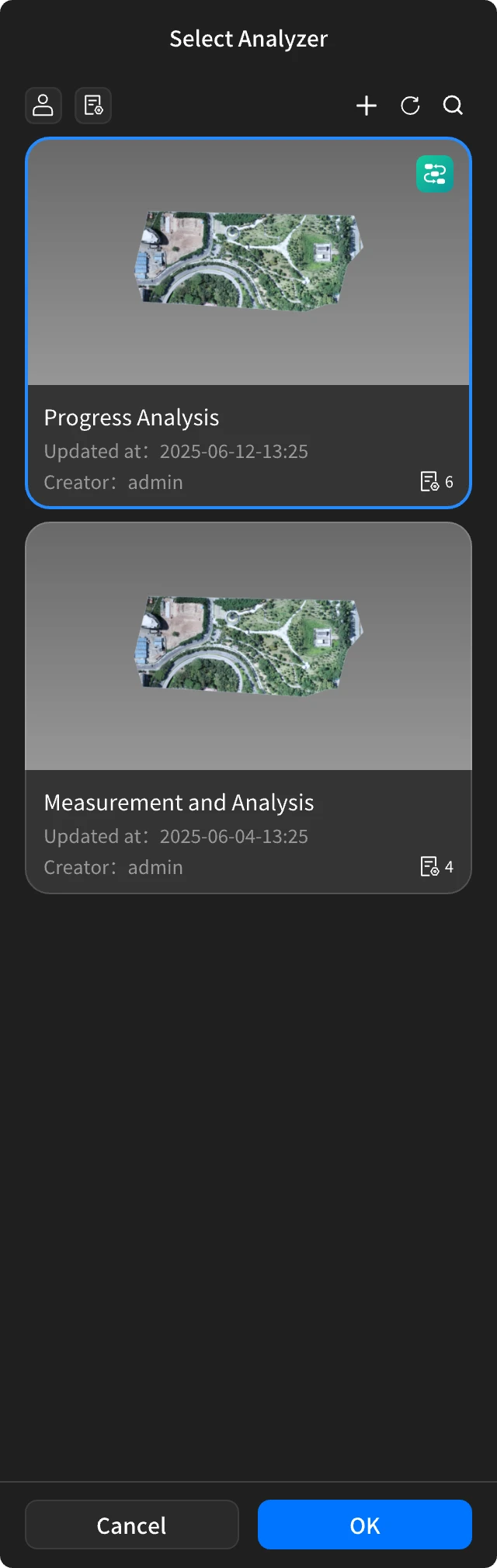
3.自動化ワークフローの構成ページに戻り、「Refresh」をクリックして、新しく作成されたアナライザーを選択します。
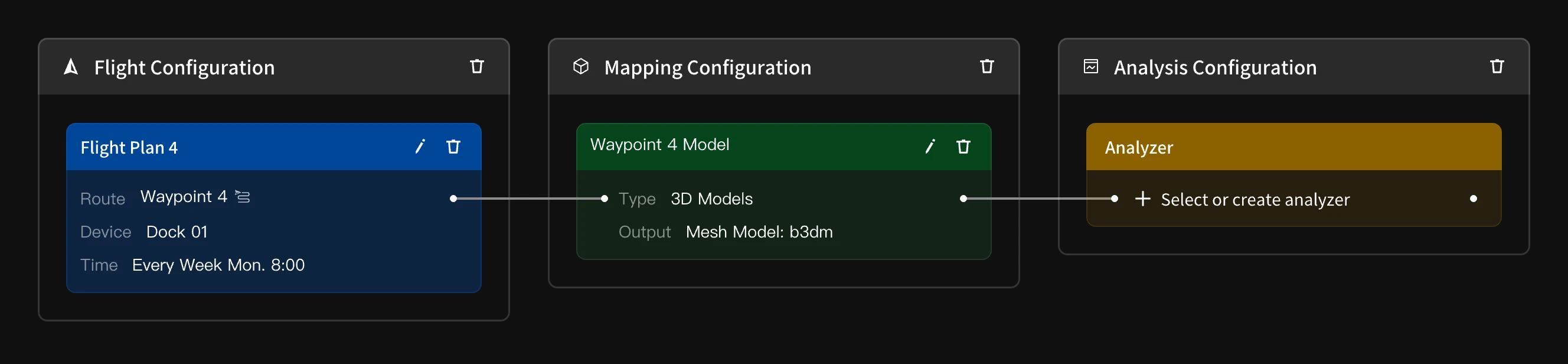
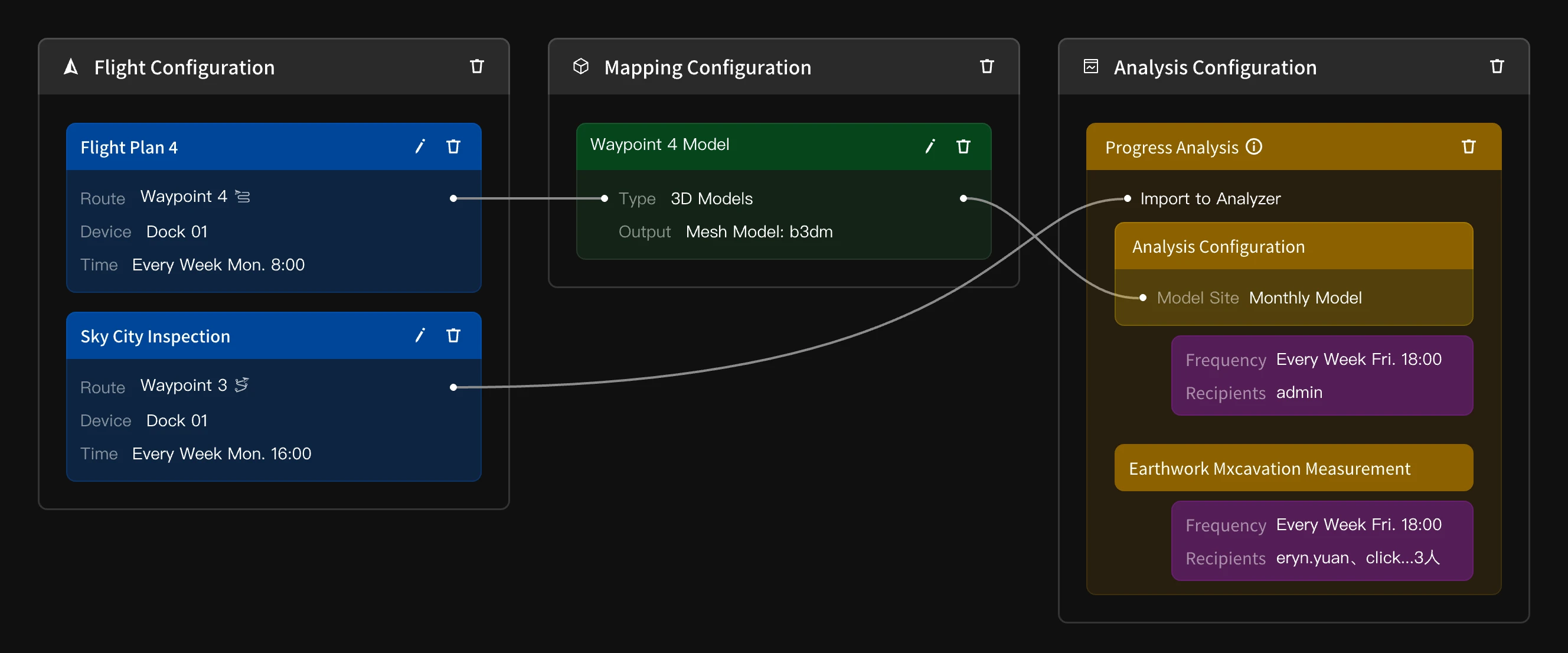
4.飛行計画、マッピングタスク、分析タスクを関連付ける
1.自動化設定ページでは、フライトプランをマッピングタスクとアナライザーにリンクできます。メディアファイルのアップロードが完了すると、モデルマッピングが自動的に実行され、結果がアナライザーに同期されて計算されます。
2.フライトプランをアナライザーにリンクさせることもできます。その場合、メディア ファイルは自動的にアナライザーにインポートされ、処理されます。
・選択したアナライザーのレポートにモデルサイトが含まれている場合は、マッピングタスクをモデルサイトに関連付けます。測定エリアは、タスクによって生成されたモデルに基づいて計算されます。
・選択したアナライザーのレポートにモデル サイトが含まれていない場合は、マッピング タスクをアナライザーに関連付けると、アナライザー内のすべてのモデルがデフォルトで計算に使用されます。
プレビュー
「Preview」ボタンをクリックするとプレビューページが開き、飛行、マッピング、解析タスクの結果が表示されます。
設定を保存して有効にする
設定が完了したら、「Save」ボタンをクリックして設定を保存します。設定が保存されたら、「Enable」をクリックして自動化を開始します。
2.トリガーされたワークフローの編集
アラートを受信した際に、航空機を自動または手動で指定地点へアサインします。災害・緊急対応、ルーチン点検などのシナリオに適しています。
ワークフローは「トリガー」>「FlyToタスク」>「機体アクション」の3ステップで構成され、これらはデフォルトで接続されています。
タスク全体を通して、航空機がドックと接続されている状態を維持する必要があります。
トリガーされたワークフロー編集の詳細はコチラ
トリガーされたワークフローの編集方法
エントリー方法と権限
・エントリー:左側パネルの「Automated Workflow」をクリック → 右上の「Create Workflow」
・権限:このワークフローを作成できるのは プロジェクト管理者(project administrator) と スーパー管理者(super administrator) のみです。


トリガー設定
トリガーは後続のワークフローを発動するために使用します。
自動トリガーまたは手動トリガーのうち、少なくとも1つを選択します。

自動トリガー
・切り替え:有効化すると、自動トリガー関連の設定を構成できます。
・POST アドレス:外部システムからの通知を受信します。
Public Cloud: https://es-flight-api-cn.djigate.com
On-premise: https://{host}/openapi/v0.1/workflow
・自動トリガーレベル:1〜5のレベルを設定できます(デフォルト: 3)。
インシデントレベルが閾値未満の場合は通知のみ、閾値以上の場合は自動アサインが実行されます。
・受信者と有効期限:
受信者:プロジェクト管理者のみ選択可能
有効期限: 1〜30分
タイムアウトまでに誰も応答しなければ「未応答」となり、後続ステップはキャンセルされます。
・サードパーティーシステム連携との連携手順:外部システム開発者に以下を共有し、HTTP リクエストで自動トリガーを実行します。
{
// ========================= HTTPリクエストヘッダー =========================
//
// コンテンツ-タイプ: application/json
//
// リクエストの有効性を確認するために使用される[認証キー]。
// [組織設定] > [FlightHub Sync] へ進み、YOUR_SECRET_TOKEN を取得して差し替えてください。
// X-User-Token: YOUR_SECRET_TOKEN
//
// [プロジェクトID] 現在の構成に関連付けられているプロジェクトの一意の識別子です。そのまま使用してください。
// x-project-uuid: {value obtained from interface}
//
// ========================== HTTPリクエストボディ ===========================
{
// [システムパラメーター] 一意のワークフロー識別子。これはシステムによって生成された値です。そのまま使用してください。(文字列)
"workflow_uuid": "{value obtained from interface}",
// [固定値] トリガータイプ。必ず0を入力してください。(整数)
"trigger_type": 0,
// [サービスパラメーター] アラートタスクの名前。(文字列)
"name": "High-voltage tower foreign object-20231113180000",
// [コアパラメーター] アラートのコア業務パラメーターを含むオブジェクト。(オブジェクト)
"params": {
// [コアパラメーター] アラートのコア業務パラメーターを含むオブジェクト。(オブジェクト)
"creator": "1988423428261173248",
// [サービスパラメーター] アラート緯度。座標系の標準はWGS84です。(数値)
"latitude": 22.793234156,
// [サービスパラメーター] アラート緯度。座標系の標準はWGS84です。(数値)
"longitude": 114.258620618,
// [コア業務パラメーター] アラートレベル(自動割り当てのトリガーに使用)。(整数、範囲1~5)
// 設定された自動トリガーレベル以上になると、機体が自動的に割り当てられます。
"level": 5,
// [業務パラメーター] アラートの詳細な説明。(文字列)
"desc": "Unknown floating object was found on the A-phase insulator string of high-voltage transmission tower 35.Verify immediately."
}
}
}
応答の説明
・成功(200 OK):FlightHub がアラートを正常に受信し、レベルに基づく後続処理を開始しています。
・失敗(その他のステータスコード):リクエストに問題があります。
主なエラー例:
400 Bad Request : リクエストの形式またはパラメーターのエラーです。
一般的な理由: 通常、**リクエスト本文(Body)**のJSON形式が正しくないこと、必須フィールドが不足していること、またはフィールドのタイプが一致していないことを示します。
特定のエラーコード(応答本文で返されます):
code:245008: ワークフローがプロジェクトと一致しません(ワークフローがプロジェクトに含まれていません)。
理由: リクエスト本文内のworkflow_uuidが、リクエストヘッダーx-project-uuidで指定されたプロジェクトと一致していません。
推奨事項: 使用するworkflow_uuidおよびx-project-uuidは、必ず現在の設定ページから取得し、他のプロジェクトの設定と混在させないでください。
401 Unauthorized / 403 Forbidden : 検証に失敗しました。
理由: 通常、 リクエストヘッダー(Headers) 内のX-User-Tokenが誤っていること、欠落していること、もしくは有効期限切れであること、またはx-project-uuidが一致していないことを示します。
推奨事項: ヘッダーの設定を確認し、X-User-Tokenが 「組織設定」>「FlightHub Sync」から正しく取得されていることを確認してください。
500 Internal Server Error: サーバーエラー。
理由: FlightHubがリクエストを処理中に予期しない問題が発生しました。
推奨事項: 後でやり直してください。問題が解決しない場合は、テクニカルサポートに連絡してください。
手動トリガー
・切り替え:有効化すると、マップ上で右クリックしてタスクを手動トリガーできます。
・トリガー情報:以下を入力します
インシデントレベル(デフォルト3)
タイトル
説明

機能割り当てモード
・システムの推奨:最適なデバイスをシステムが自動選択します。推奨デバイスがない場合は手動選択画面が表示されます。
・手動選択:必ず指定した1台を使用する設定も可能です。
FlyToタスク設定
航空機が目的地へ移動する方法を設定します。

共通パラメーター
・仮想コックピット設定と一致:
飛行高度:目的地まで機体が飛行する高度です。
RTH高度:機体がホームポイントに帰還する際の高度です。
目的地高度:FlyTo目的地の高度です。デフォルトでは、目的地はインシデント地点の真上になります。注記:目的地高度はドックの高度(ALT)に対する相対値です。適切な値を設定し、機体の最終高度が高すぎたり低すぎたりしないようにしてください。
インシデント地点からの水平距離:インシデント地点付近のPOIへの移動や、観察しやすくするために一定極後退する場合は、インシデント地点からの水平距離を設定できます。
信号ロスト時アクション:信号ロスト後における機体のアクションです。RTHの選択を推奨します。
最適なRTHルート計画:飛行中に地形やその他の情報に基づいて、リアルタイムで最適なルートを計画します。デフォルトで有効にすることを推奨します。
・離陸後のアクション:
連続録画:有効にすると、離陸後すぐに機器が録画を開始します。後続のアクション(パノラマ撮影など)と競合が発生した場合、録画は停止します。
機体アクション設定
航空機が FlyTo 到達後に行うアクションを設定します。
アクションの順序はドラッグで変更できます。
全アクション完了後、航空機は自動で帰還します。
注意:アクション実行中は航空機がドックと接続されている必要があります。映像伝送が途切れた場合、航空機はホバリングします。

アクションテンプレート
デフォルトアクションテンプレート(例)
1.POI中に録画
FlyTo目的地を向く → 録画を開始 → POIを開始(時計回り、5m/秒) → 300秒のタイマー → POIを停止 → 録画を停止
2.配信しながら録画
FlyTo目的地を向く → 配信を開始 → 録画を開始 → 300秒のタイマー → 配信を停止 → 録画を停止
3.POIから1分後に配信を開始
FlyTo目的地を向く → POIを開始(時計回り、5m/秒) → 60秒のタイマー → POIを停止 → 配信を開始 → 60秒のタイマー → 配信を停止
4.パノラマ撮影とズームインして写真を撮影
パノラマ > FlyTo目的地を向く > 7倍ズーム > 写真を撮影
サポートされているアクションおよびパラメーター
・FlyTo目的地を向く(パラメーターなし)
・ジンバルチルト角度(-90°~35°、デフォルト-90°)
・ズーム(1倍~112倍、初期値1倍)
・写真を撮影(パラメーターなし)
・開始/停止録画(パラメーターなし)
・ホバリング(タイマーで持続時間を制御、1~1,800秒)
・開始/停止配信(特定の配信テキストを設定)
・パノラマ(パラメーターなし)
・開始/停止POI(方向、速度0.1~14.0m/秒)
・タイマー(1~1,800秒、機体はタイマー時間中、前のアクションを継続し、タイマー終了まで次のアクションには進みません。[POI開始 - 120秒のタイマー - POI停止]を例にすると、機体は120秒間POIを維持してから停止します。
自動割り当てログ

・エントリー: 最初の自動アサインが開始されると、Automated Workflow ホームに「Triggered Workflow Automation Count」リンクが表示されます。
・内容: Incident ID、タイトル、場所、時間、レベル、ステータスなど。
・ステータス説明:
成功:3つのステップがすべて完了し、機体アクションが一部実行されました。
中断:トリガーは成功しましたが、FlyToタスクは失敗しました。
失敗:トリガーは失敗しました。
・関連記録:FlyToタスクに関連する飛行記録やメディアファイルの閲覧に対応しています。
メッセージセンター
自動アサインメントのグローバル通知
API または手動トリガー時に表示されます。
・表示内容:
アラートタイトル・説明・レベル
座標(センタリング可)
推定飛行距離・時間
アサインされたデバイス(変更可)
・操作:
割り当てをキャンセル:タスク終了
即時割り当て:カウントダウン後に自動実行、または即時実行
■ ワークフロー管理
ユーザーは、ワークフローのコンテンツをプレビューしたり、タスクと操作のログを表示したり、必要に応じてワークフローを編集またはプレビューしたりできます。
タスクログの表示
自動化されたワークフローの実行ステータスを表示するには、![]() をクリックして「Task Logs」をクリックします。
をクリックして「Task Logs」をクリックします。
操作ログの表示
自動化されたワークフローのオペレーター情報と操作記録が表示するには、![]() をクリックして「Operation Logs」をクリックします。
をクリックして「Operation Logs」をクリックします。
| 第10講 アナライザーについて | 徹底解説TOP |
「もう少し商品について知りたい!」
「自分の業務にも活用できる?」
記事に対しての要望など、どんなご相談でも構いません!お気軽に下記のフォームにてお問い合わせください!
導入のご提案やお見積は、貴社の所在地に近い販売代理店より改めてご連絡します。